




































自動運転車の安全性評価―交通事故に至る過程を仮想空間上に再現する研究―(先進自動車研究所 所長/特任教授 井上 秀雄)
神奈川工科大学が主導する国家プロジェクトでは、「仮想空間シミュレータ(DIVP:Driving Intelligence Validation Platform)」を開発してきました(参考文献1)。今回は、この応用例として、警察庁の死亡事故情報から歩行者や自転車との衝突事故に至る過程を仮想空間上に再現する研究を紹介します。この事故再現モデルから、自動運転車のカメラ等センサの認識性能や事故リスクを評価することで、事故回避のための運転知能技術の開発に貢献できます。

先進自動車研究所 所長/特任教授 井上 秀雄
まず、警察庁の交通死亡事故データを調査!
日本の警察庁の一般道での交通死亡事故データを調査すると、車両対車両よりも、車両対歩行者、車両対自転車の死亡事故形態の種類(パターン)が多いことが解ります(表1)。それぞれの事故は、実地調査・検分に基づき、引責割合等、詳細な情報が判例タイムズ(参考文献2)という冊子にまとめられており、これまでのデータからは32個のパターンに整理できます。
一方で、自動運転車の実証実験では、現在、市街地の目的地から目的地までの設計された走行条件の中で安全に走行できるかのリスクアセスメントが認可対象の一つとなっており重要な設計~検証の工程になっています。これを「運行設計領域(ODD:Operational Design Domain)」(参考文献3)と呼んでいます。このリスクアセスメントにおいて、既に起こった死亡事故の再発防止をチェックして、自動運転車が歩行者や自転車が遭遇する場面で速度を落とし安全な走行条件にしたり、元々の認識から判断の自動運転車の能力を改善したりする必要があります。このように、交通死亡事故データは、再発防止の観点から大変、重要な情報源ですが、このままでは静的な情報にとどまり、動的に動く場面の定量的な情報になっていないので、対応策に反映することができません。
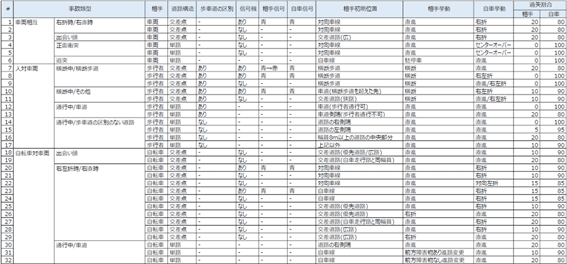
表1 警察庁データからの一般道での交通死亡事故パターン(判例タイムズより抽出)
次に、仮想空間シミュレータにより死亡事故を動的に再現!
そこで、神奈川工科大学が中心となって開発した「仮想空間シミュレータ(DIVP)」を使って、死亡交通事故の聞き取り情報から、カメラなどセンサからもリアルな認識環境を再現し、かつ、歩行者や自転車と自車の動き(位置や速度の関係性)から事故に至った経過を再現することで、どうすれば事故にならないかを仮想空間上で解析可能とする研究にチャレンジしています(図1、図2)。
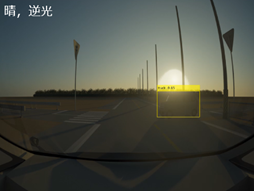
図1 逆光での交差点事故の再現
(晴れで見通しの良い交差点であるが逆光で
交差車両が見えなくなった事故シーンの再現)

図2 駐車車両追抜き自転車との事故再現
(夜間、駐車車両を追い越してきた自転車と自車
の事故シーンの再現)
ここでは、これらの事故パターンから典型的な夜の見通しが悪い状況で前方の歩行者を衝突させてしまった事故パターンの再現例を示します。
事故の調書情報から、自車速度を40~50km/h、歩行者 8km/h(ランニング状況と解釈)、夜間の光源を、街燈、自車ライト(下向き)、路面反射光、道路形状などを設定しています。確かにこの再現映像から、人間が見ても前方の歩行者を見にくい様子が伺えます(図3)。更にこの場面でカメラの認識では、どのくらいの距離で認識ができるかを仮想空間上で評価してみました(カメラもシミュレーションモデルを設定)。
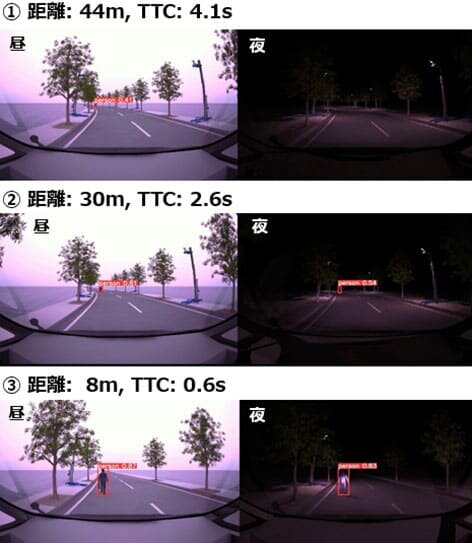
図3 夜間、前方歩行者と自車との事故シーンの再現
そして、認識性能と衝突リスクを評価し、事故防止方策に反映!
まず、昼間に比べて夜間がどれだけカメラの歩行者の認識性能が低下するかを評価しました。ここでの認識アルゴリズムは、一般に公開されている"YOLO8"(参考文献4)を標準的な性能を持っているものとして使用しました。自車が歩行者を初めて認識できるタイミングと相対距離を図3に示します。昼間が44m前方(①)で歩行者を認識できるのに対して、夜間は同じ走行条件でも30m前方(②)での検出となり、約32%も低下します。さらにこれを、ぶつかるまでに時定数指標のTTC (Time to Collision) (参考文献5)に換算すると、それぞれ、ブレーキで減速するのに十分な余裕のあるTTC=4.1秒(①)からTTC=2.6秒(②)と34%も余裕時間が減り、急なブレーキを要する危険なレベルまで低下します。また、認識性能の信頼度(Confidence値)(参考文献6)と相対距離、および、TTCの関係を図4、図5に示します。このConfidence値でも、昼間にくらべ夜間が大幅に落ちる様子が定量的にわかります。Confidence値が0.8を超える高い認識信頼性を得るには、③の様にTTC=0.6秒とぶつかる寸前の危険な状態になってしまい、「時すでに遅し!」となります。このように、事故再現により定量的な評価と解析ができると、対応方法を検討することができます。例えば、カメラならダイナミックレンジを広げ夜間のような光量の少ない領域でも分解能を高めたり、夜の検出に強い近赤外光のLiDARや電波のミリ波レーダを使い検出能力を高めたりする、センサシステムでの対応が考えられます。更には、運行設計領域ODDにおいて、夜間は走行しない、認識の限界を考慮して検出してブレーキ回避できる速度まで落として運行するなど、走行条件での対応も考えることができます。
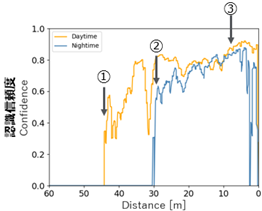
図4 認識信頼度と歩行者までの相対距離
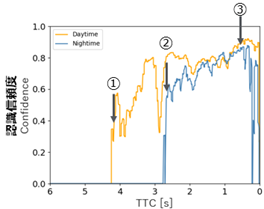
図5 認識信頼度と歩行者までのTTC
終わりに
皆さん、如何だったでしょうか。事故情報をコンピューター上の仮想空間に動的に再現し、再発防止の観点から解析結果を自動運転車のシステムや運行設計領域ODDの開発にフィードバックすれば、確実に安全性能を確立できます。コンピューター上での事故再現も、「仮想空間シミュレータ(DIVP)」の有効な使い方と言えます。
ご興味のある方は、遠慮なく下記にお問い合わせ下さい。
学校法人幾徳学園 神奈川工科大学
研究推進機構 先進自動車研究所 所長
DIVPプロジェクトリーダー
特任教授(常勤) 井上 秀雄
TEL: 046-291-3067
Mail: inoue@cco.kanagawa-it.ac.jp
これまでの活動成果と今後
「仮想空間シミュレータ(DIVP)」は、神奈川工科大学/井上秀雄教授がリーダとなり、2018年12月から内閣府の事業「戦略的イノベーション創出プログラムSIP第2期自動運転」の採択プロジェクトとして推進し、開発してきました。このプロジェクトでは、様々な交通環境下で、現実空間と同様に実車評価を行えるシミュレーションプラットホームの構築を目指し、目標通りの「仮想空間シミュレータ」を開発することができました。
更に、2023年4月には、自動運転レベル4の全国での地域実証実験がスタートしました。各地に続々と生まれつつある自動運転レベル4プロジェクトの安全性評価ニーズへの貢献を実施中です。また、仮想空間シミュレータは、ドイツを中心に世界の技術界で国際標準化の活動が進んでいます。DIVPは、国際標準化の活動にも貢献しています。

図6 仮想空間シミュレーションでの臨海部副都心地域
参考文献
(1) SIP自動運転の成果を活用した安全性評価用シミュレーションソフトの製品化~戦略的イノベーション創造プログラム(SIP)研究成果を社会実装へ~ (cao.go.jp)
(2)民事交通訴訟における過失相殺率の認定基準[全訂5版], 別冊判例タイムズ38号 別冊38号, 2014年07月04日, 判例タイムズ社
(3)自動運転のODD(運行設計領域)とは?(2024年最新版)
(4) YOLOv8 -Ultralytics YOLO ドキュメント
(5)国土交通省 平成 28 年度 衝突被害軽減制動制御装置[対車両]性能試験方法(案)
(6)物体検出手法の歴史 : YOLOの紹介
▼関連するSDGs
3 すべての人に健康と福祉を

7 エネルギーをみんなにそしてクリーンに
9 産業と技術革新の基盤をつくろう

10 人や国の不平等をなくそう
