





































自動運転車の安全性評価を仮想空間で実現する「仮想空間シミュレータDIVP」の研究 ( 先進自動車研究所 所長/特任教授 井上 秀雄 )
自動運転は多種多様な走行環境で最高レベルの安全性が要求されます。自動運転では、周りの車両や人、障害物などを検知するため、眼の役目をする「カメラ(可視光使用)」「LiDAR(ライダー)(近赤外線使用)」「ミリ波レーダ(ミリ波電波使用)」といった各種センサが必要です。神奈川工科大学 先進自動車研究所が開発した「仮想空間シミュレータDIVP(Driving Intelligence Validation Platform)」は眼となる各種センサと走行環境を仮想空間として再現し、安全な自動運転車の開発に貢献しています。

先進自動車研究所 所長/特任教授 井上 秀雄
なぜ自動運転車の開発には「仮想空間シミュレータ」が必要なのでしょうか?
自動運転車の安全性を保証するためには、「カメラ」「LiDAR」「ミリ波レーダ」の各種センサに対し、膨大な数の走行条件や、再現の困難な最悪条件までもテストして開発する必要があります。
例えばカメラで歩行者を検出する場合、歩行者の服の色、手荷物やベビーカー、背景に映り込む景色、夜か昼か、天気(雨・霧・雪)...等の無数のパラメータが検出率に影響を与えます。現実の車両実験だけで到底テストし切れる量・難易度ではないため、「仮想空間シミュレータ」上のテストで補完することが必須です。
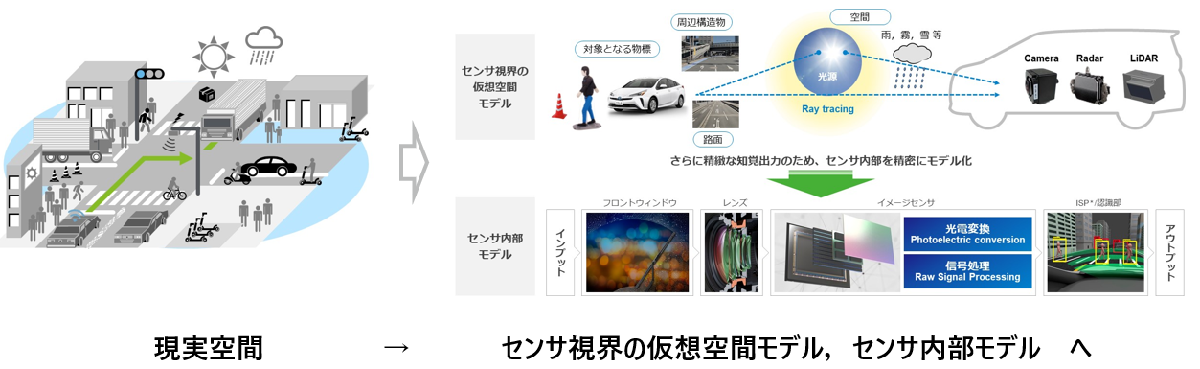
図1 実現象と一致性の高い仮想空間シミュレータDIVP
「仮想空間シミュレータ」が再現すべき現象は何でしょうか?
実は、自動運転車の「眼」である各種センサにはそれぞれ検出の弱点となる環境条件があり、それらの環境条件を忠実に再現できる「仮想空間シミュレータ」が必要です。神奈川工科大学 先進自動車研究所では、外界の現象や各センサの内部の動作・物理現象を深く理解し、それらを忠実に再現したモデル(プログラム)を開発し、DIVPに組み込んできました。 図2~4は、DIVPによる実験の様子です。図2では強い逆光により、可視光を利用する「カメラ」では信号機が見えなくなる現象が再現されています。

図2可視光を利用する「カメラ」では逆光での信号機は認識不良となる
図3では豪雨により、可視光を利用する「カメラ」では前方の視界が妨げられる様子が再現されています。

図3 可視光を利用する「カメラ」では豪雨での信号機は認識不良となる
更に、図4では空間の雨滴により、近赤外線を利用する「LiDAR」では周辺が検出できなくなっている様子が再現されています。
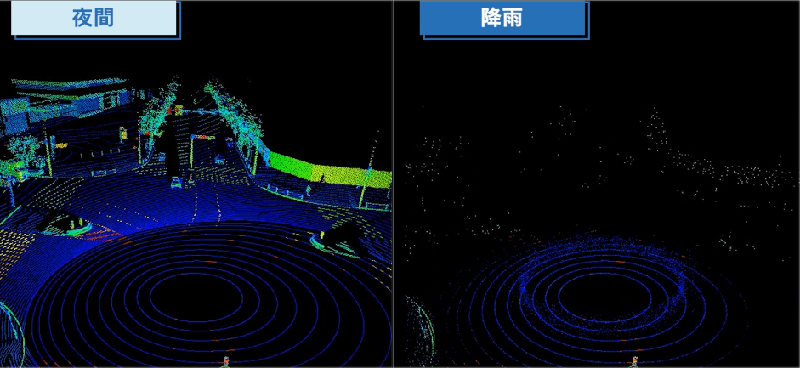
図4 近赤外線を利用する「LiDAR」は晴れていれば夜間でも良好な検出結果を得られる(左)が雨が降ると周辺の検出が困難になる(右)
これまでの活動と成果
DIVPは、神奈川工科大学/井上秀雄特任教授がリーダ機関/プロジェクトリーダとなり、2018年12月から内閣府の事業「戦略的イノベーション創出プログラムSIP第2期自動運転」の採択プロジェクトとして推進し、開発してきました。このプロジェクトでは、様々な交通環境下で、現実空間と同様に実車評価を行えるシミュレーションプラットホームの構築を目指してきましたが、目標通りの「仮想空間シミュレータ」を開発することができました。
更に、社会還元として新会社も設立し、現在、自動運転車の開発ユーザに使って貰っています。
今後の活動
2023年4月には、自動運転レベル4(表1)の全国での地域実証実験がスタートしました。各地に続々と生まれつつある自動運転レベル4プロジェクトの走行ニーズに対し、シミュレータの更なる改良を続け、安全性評価への貢献を目指します。
また、仮想空間シミュレータは、ドイツを中心に世界の技術界で国際標準化の活動が進んでいます。DIVPは、国際標準化の活動にも貢献しています。
表1 自動運転レベルについて
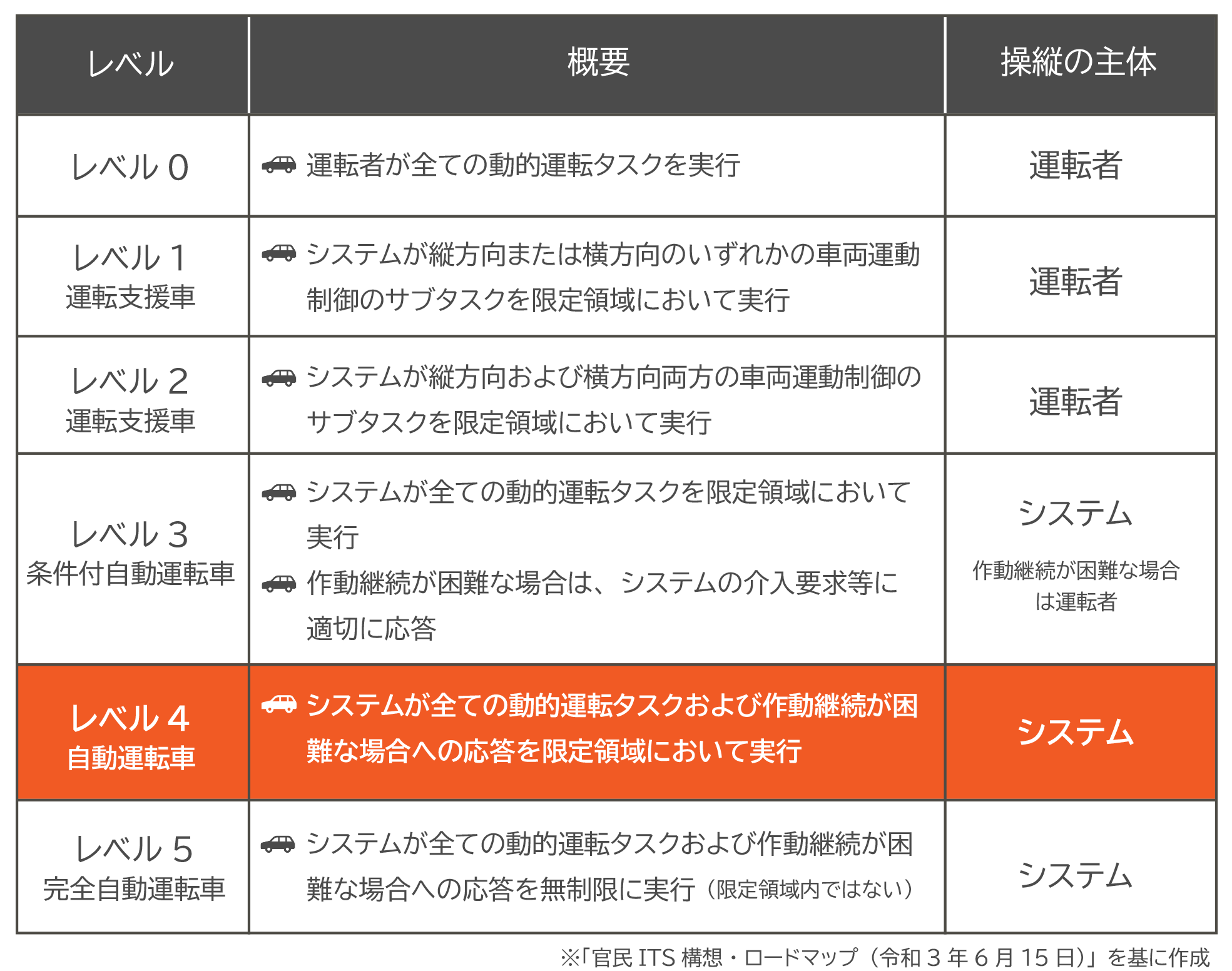

図5 仮想空間シミュレーションでの臨海部副都心地域
※ 今回の記事の様に、現実世界の情報を基にデジタルな仮想世界にその複製を構築し、様々なシミュレーションを行う技術のことを「デジタルツイン」と言います。
▼関連するSDGs
3 すべての人に健康と福祉を

7 エネルギーをみんなにそしてクリーンに
9 産業と技術革新の基盤をつくろう

10 人や国の不平等をなくそう
