





































身体性をもつ共生型AIの研究(先進AI研究所所長 情報学部 情報システム学科 准教授 三枝 亮)
先進AI研究所の人間機械共生研究室では,身体性をもつ共生型AIの研究を行っています。

先進AI研究所所長 三枝亮准教授(情報学部 情報システム学科 )
はじめに
近年、自動運転車やスマートフォンなどのように、これまで人が操作していた装置や道具にAIが導入されてきました。その結果、機械に細かな操作や指示を与える必要がなくなって便利になってきた反面、望んでいた結果と異なる状況に対処しなくてはいけないことも増えてきました。
例えば、掃除をしているロボットの前方に邪魔な物があると、物を少し動かしてあげればロボットは掃除がしやすくなります。掃除の問題を根本的に解決するためにはロボットを改良して認識や行動の機能を高めるべきなのかもしれません。一方で、ロボットが行おうとしている掃除の流れを予想してそっと手助けする方が、手っ取り早い解決方法となることもあります。
対面する機械に対する受け止めや対処方法はその機械を詳しく知る人とそうでない人で異なります。しかしながら、機械の自律性や複雑性が高まってくると、その機械の開発者でも思い通りに機械を動かすことが難しく感じるようになります。また、機械の素朴な意志を感じ取って行動を助けてあげたい気持ちになることもあります。人間の生活空間で働くシステムやロボットと上手く付き合うためには、自分の意思を示すことや相手の意思を理解することが、人間と機械の双方に必要なのかもしれません。

パシフィコ横浜 成果報告にて
研究のねらい
さて、このような人間と機械の共生に関する問題を背景に行っている研究が、冒頭に述べた身体性をもつ共生型AIの研究です。人間とAIがやり取りし、その結果として共に知能を発達させることができるようなメカニズムを見つけることが研究の目標です。
共創的な知能の発達を実現させるためのメディアとして、私たちはAIの身体性に着目しています。ここでの身体性とは広義の意味で、人間が触れることができるハードウェアに加えて、仕草や表情などの動きを表現するCGアバターや視覚的な存在感を与える投影体など、身体の代わりになるソフトウェアも含みます。
AIが身体性をもつと、AIは人と直接的なやり取りができるようになります。また、AIは身体性をもつことで有限な存在となり、有限であることが行動を制約してAIを発達させるきっかけを与えます。字数制限やキャンバスの大きさに制約があると、そこに書かれる文章や描かれる絵は強い影響を受けます。これと同じように、自分が取れる行動に制限や限界があるから、いくつかの取れる行動の中から最良な行動を選んで実行するというわけです。つまり、行動を最適化する意味で、身体は知能を生み出す要因になっているといえます。
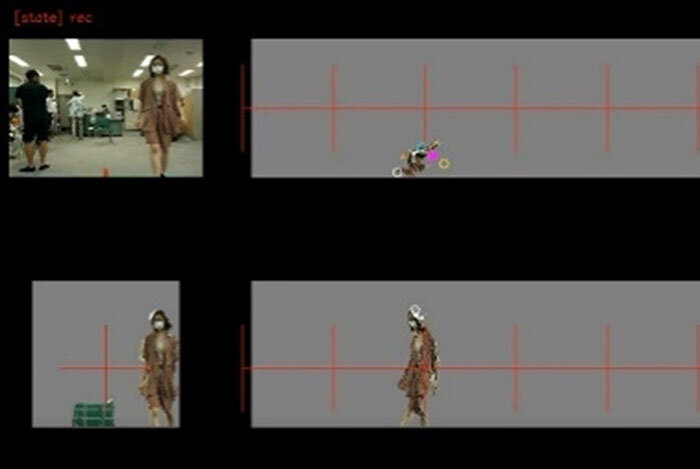
図1. 歩行計測システム(Camina)
研究開発の事例
最近の囲碁や将棋では戦法の研究や対局の観戦にAIが活用されていますが、これからは人間とAIが身体を使いながら共創的に知能を発達させていく世界が到来するだろうと私たちは考えています。本稿ではそのような未来をイメージして開発したシステムやロボットを紹介します。
図1のCamina(カミーナ)は理学療法で用いられる歩行テスト(TUG Test)の動作を計測して歩行機能を評価するシステムです。高齢者のフレイル予防のために歩行機能を日常的に計測します。
図2 のRosnu(ロスナ)は間や無言などの沈黙を認識して応答する体を持った音声対話システムです。話者の無言に対して語り掛け、システムが応答内容を考える際に生じる間の意味を仕草で表現することで、自然な会話のリズムを作ります。
図3のCibo(チーボ)は食卓の状態や手先と口腔の動作を認識して食事の進行を助けるシステムです。食事の誘導や案内は高齢者や視覚障害者、子供にも有効です。食物をよく噛んでいるか、咀嚼についても非接触で見守ります。

図2 音声対話システム(Rosnu)
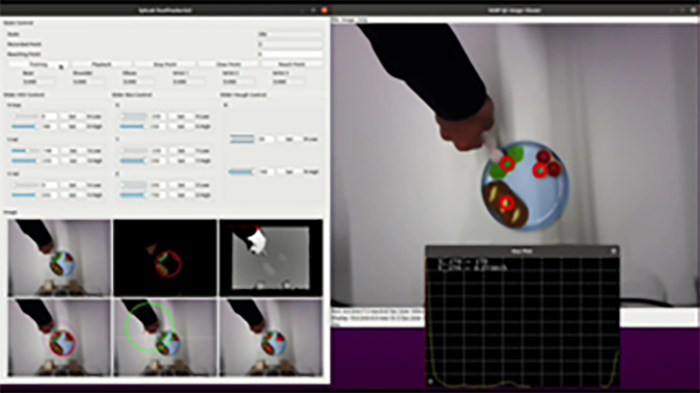
図3 食事支援システム(Cibo)
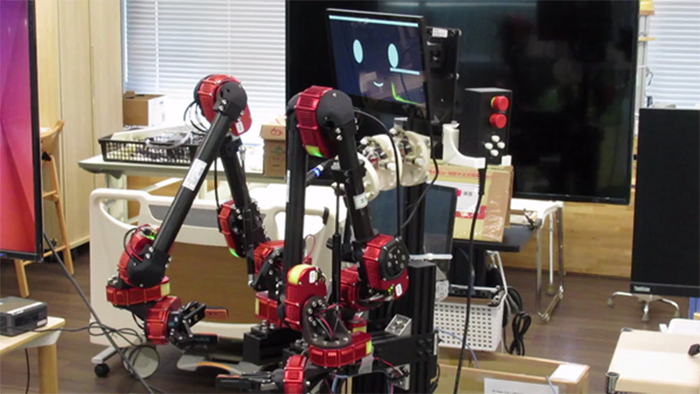
図4 食事介助ロボット(Mani)

図5. 生理計測ロボット(Lucia)
図5のLucia(ルチア)は介護、医療、福祉の現場で見守りや生理計測を行うヘルスケアロボットです。昼間は介護施設の利用者の健康管理を支援します。巡回中に施設の利用者を見つけると近寄り、アームを握ってもらうことで脈拍や血中酸素飽和度を確認します。また、夜間は職員の見守りの作業を支援します。出歩いている人を見つけると声を掛け、倒れている人には近寄って呼吸や体温を確認して職員に知らせます。これらのシステムやロボットは産学官連携研究プロジェクトとして推進している事業の研究成果です。 学内外で行った成果報告の様子を図6、7に示します。
今後の予定

図6. 成果報告 神奈川県本庁舎

図6. 成果報告 本学先進技研
図7. 成果報告(県広報誌11月号)