





































利用者の心理的な反応を考慮したパーソナル・ビークル制御(ロボット・メカトロニクス学科 教授 高橋良彦)
電動車椅子等のパーソナル・ビークルは、スーパー等人混みで利用する機会が多い。人混みでの利用は、高齢利用者に心理的負担となる。本研究では、周囲の人が移動する際のパーソナル・ビークル利用者の心理的動揺を計測した。
ロボット・メカトロニクス学科 高橋良彦教授
日本は、すでに高齢化社会を迎えている。高齢化社会では、高齢者が自立した生活を送ることが望まれ、スーパーや病院等に援助者なしで行けることが期待されている。移動手段としては、電動車椅子が良く利用されており、障害物回避制御や自動運転制御等の研究が行われている。高齢者が電動車椅子等のパーソナル・ビークルを利用してスーパー等の人混みの中を移動する場合、他の人に接触するのではないかとの不安があり、心理的に負担となる可能性が高い。周囲の人が移動する際のパーソナル・ビークル利用者の心理的な動揺を計測し、そのデータに基づいてパーソナル・ビークルを制御できれば、利用者の心理的な負担を低減できる。
そこで、本研究では、まず周囲の人が移動する際のパーソナル・ビークル利用者の心理的な動揺を計測・評価した。利用者の心理的な動揺の計測には、皮膚電位計(GSR)を使用した。
図1には使用した皮膚電位計の写真とセンサーを腕に固定している様子を示した。電極は三つあり、写真のように固定する。出力を用いてデータロガーで取得した。図2に実験結果を示す。利用者が電動車椅子に乗り、ドアの内側に停止し、ドアの外側を他の人が横切る条件である。電動車椅子の利用者は、ドアの内側にいるので、外の人が突然目の前を横切る形である。ドアを横切る際にドアとの距離を実験条件とした。(a)200[mm]、 (b)600[mm]、 (c)1000[mm]。実験結果から、近くを横切る際に、利用者の動揺が大きいことが分かった。今後、さらに条件を増やしてパーソナル・ビークル利用者の動揺現象を調査していく。
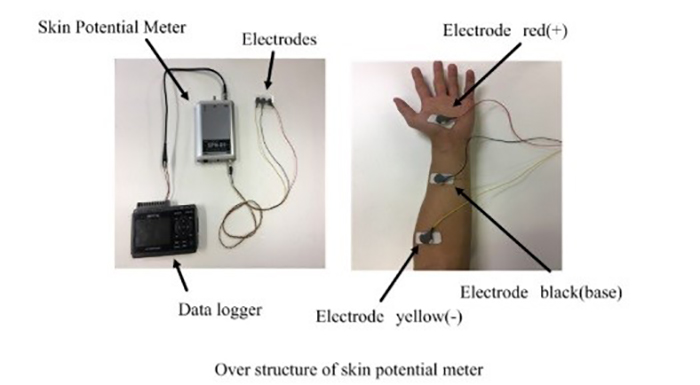
図1 皮膚電位計とセンサー固定の様子

図2 皮膚電位計測定結果 (a) 200[mm], (b) 600[mm], (c) 1000[mm]
→