





































「乗る人の視点」で車の性能を評価するために ~運転支援・自動運転車の性能評価に関する研究~ (先進自動車研究所 学内特別研究員 上原 健一)
ドライバの運転操作を支援する「先進運転支援システム(ADAS:Advanced Driver-Assistance System)」の開発では、実際に公道で車を運転する人(乗る人)視点での評価が重要になります。神奈川工科大学 先進自動車研究所では、乗る人の視点で市販車に対するADAS評価法を研究しています。今回は、高速道路でのレーントレース機能(※1)や、他車が自車の前に割り込んできた(カットイン)時に自動で減速する性能の評価法と考察についてご紹介します。

先進自動車研究所/上原 健一学内特別研究員
実際に販売されている車を使ったADAS性能の評価実験
近年、ADASや自動運転技術は活発な研究開発が進められています。しかし、乗る側としては、実際に車を運転してみなければ体感することができず、その価値が伝わりにくいのが課題となっています。
ADASの3つの主制御機能として「車線維持支援システム(LKAS:Lane Keeping Assist System)」「車線逸脱防止システム(LDP:Lane Departure Prevention)」「定速走行・車間距離制御システム(ACC:Adaptive Cruise Control)」があります(表1)。神奈川工科大学 先進自動車研究所ではこの3つを高速道路で検証することで、公道での主観評価を実施しました。さらに、この結果を反映した客観的な定量的評価指標の確立を目指した研究を進め、実際に販売されている車のデータを積み上げてきました。
表1 先進運転支援システム(ADAS)の自動車専用道路での3つの主制御機能
| 車線維持支援システム(LKAS:Lane Keeping Assist System) |
| 車線逸脱防止システム(LDP:Lane Departure Prevention) |
| 定速走行・車間距離制御システム(ACC:Adaptive Cruise Control) |
※LKAS、LDP、ACCでは、レーダーセンサやカメラセンサにより車線や前方/周辺車両を検出し、エンジン、ブレーキ、ハンドルを制御する。
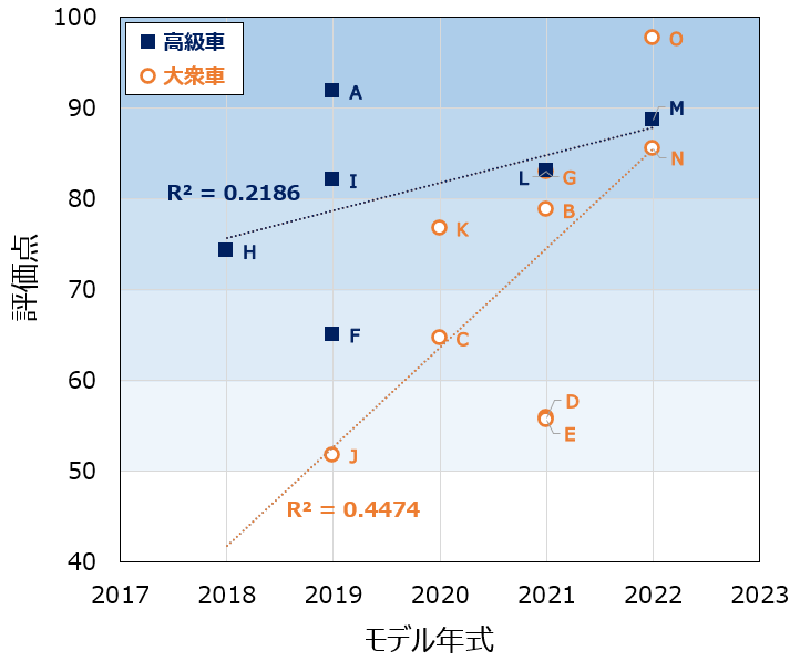
図1 モデル年式での高級車/大衆車の性能推移
「制御継続性」「中央走行性」「オーバーライド性能(※2)」「車線逸脱防止」の4項目を総合的に評価
図1は、実際に販売されている車(高級車:6種、大衆車9種)のモデル年式によるADAS性能の推移を表したグラフです。同じ「ADAS搭載車(LKAS/LDP/ACC搭載車)」と言っても、モデル年式や車種によって大きな性能差があることが分かります。この様な情報は、できれば車両の購入前に知りたいことでしょう。
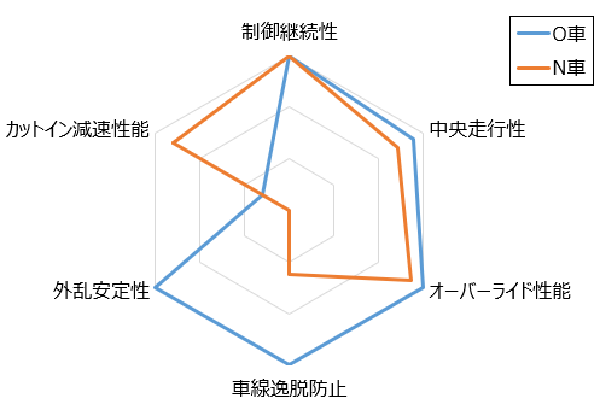
図2 O車、N車の各性能比較例
図1に「カットイン減速性能」と「外乱安定性」の評価項目を追加
図2は、同じ2022年式モデルの大衆車である「O車」と「N車」のADAS性能を比較した図です。新たにカットイン時の減速性能(並走トラック等の割込み時の自動減速)と外乱安定性を加え、6つの項目で評価したところ、性能に大きな差が見られ、車種によって課題となる項目が違うことが分かりました。
性能の落とし穴「空白領域」の見える化
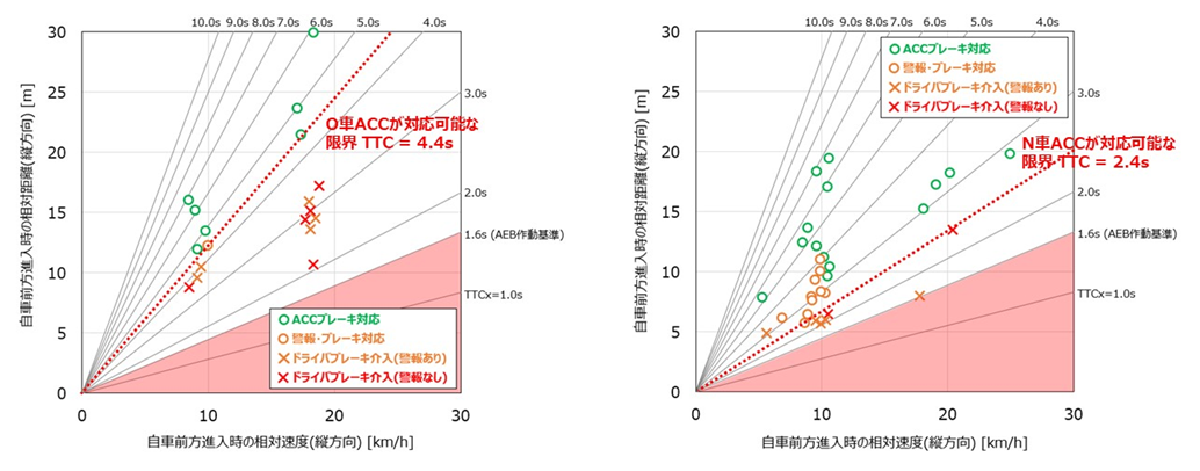
ここで、カットイン減速性能の解析結果について、もう少し詳細に見てみましょう。自車がACCを使用している状態で、隣の車線より他車が自車の前にカットインしてきた状況をテストコースで再現実験しました。両車の速度差を徐々に大きくしながら、ACC自動減速のタイミングを評価しました。さらに、ドライバが怖いと思い自分でブレーキ減速するタイミングと、ACC自動減速のタイミングを比較評価しました。その結果を図3に示します。
(O車)
(N車)
TTC(Time to Collision):衝突余裕時間(相対距離/相対速度;単位 秒)
AEB(Autonomous Emergency Braking):衝突被害軽減ブレーキ
図3 カットイン時のACC対応限界TTC
衝突余裕時間(TTC:Time to Collision)とは、その速度のまま走行した時に前方車に衝突するまでの時間です。TTCが小さくなるに従ってより厳しい条件になります。O車がTTC=4.4secまでしか対応できないのに対し、N車はTTC=2.4secとより厳しい条件までACCブレーキが作動しています。つまり、N車の方が性能が良いと言えます。
また、赤色で塗ったTTC=1.6sec以下の領域は、衝突被害軽減ブレーキ(AEB:Autonomous Emergency Braking)で規定されている作動領域を示し、ぶつかる可能性のある領域です。つまり、カットイン時のACC作動限界TTCと、AEB作動領域TTCの間に、ドライバが怖いと思い対応しなければならない空白領域があるという課題が見えてきます。本実験でも、空白領域ではACC、 AEBの両システムとも自動ブレーキは機能せず、人間が怖いと思い自分でブレーキを踏んで対応しています(図3の×点)。これでは、カットイン時に信頼される運転支援性能とは言えません。
そこで我々は、この研究を発展させ、シミュレーション上でカットインシーンを再現し、制御方法の改良も進めています。
高精細なシミュレーション実験で「空白領域」のない車を目指す
神奈川工科大学 先進自動車研究所では、自動運転車の開発を支える「仮想空間シミュレータDIVP(Driving Intelligence Validation Platform)」を開発してきました(※3)。DIVPで再現したカットインシーンの映像を、奥行き感があるため映像をリアルに感じることができる球面スクリーンに投影し(図4)、ドライバが実車同様に危ないと感じブレーキを操作するタイミングを評価しています(図5)。
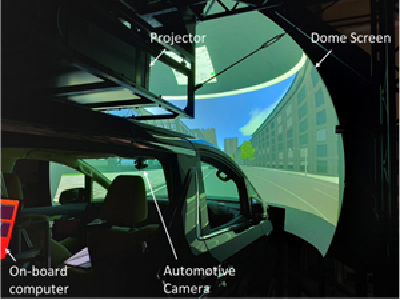
図4 球面スクリーンと仮想空間シミュレータ映像の投影
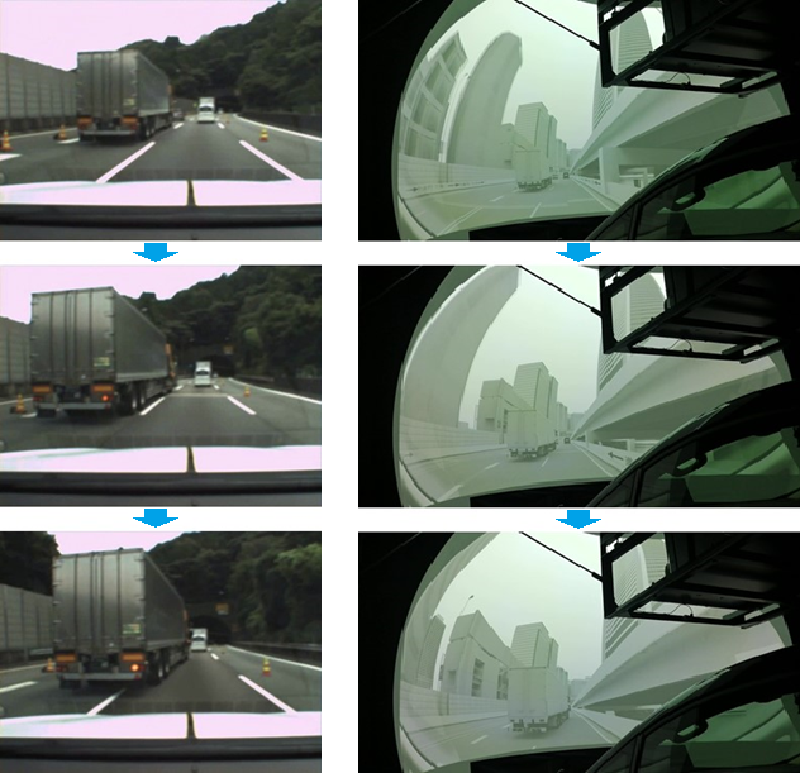
[実車での危険シーン映像]
[DIVPでのカットイン再現]
図5 実車での危険シーンのDIVPでの再現による研究
このように隣接車両の横速度や前後相対速度など条件を変えたシーンを造り出して何度も実験を繰り返すことで、ACCやAEBといった運転支援技術に必要な制御パラメータと人間知覚の最適な関係を数値的に表せるようになります。その結果、今まで空白領域と呼ばれていた条件でも、カットイン時に安全かつ安心感のある自動ブレーキの制御方法を開発することが可能となります。
如何だったでしょうか・・・
開発者ではなく、乗る人視点で現状の先進運転支援システムや自動運転システムを客観的に評価する指標を開発し、課題となる機能を実車や最新シミュレータを使って再現させ、制御方法の改善に結び付ける。このような王道の研究プロセスからみんなに愛される技術が産み出されると信じて、日々、研究と開発に励んでいます。
※1 レーントレース機能:自動車が高速走行する際、車線の中央を走るようにハンドル操作をサポートしてくれる機能。
※2 オーバーライド性能:自動運転システム作動中でも、ドライバの操作による車両の制御が優先されることをオーバーライドと言う。
※3 仮想空間シミュレータDIVPは、神奈川工科大学/井上秀雄特任教授がリーダ機関/プロジェクトリーダとなり、2018年12月から内閣府の事業「戦略的イノベーション創出プログラムSIP第2期自動運転」の採択プロジェクトとして推進し、開発してきた。
DIVPについては以下の記事をご覧ください。
▼関連するSDGs
3 すべての人に健康と福祉を

7 エネルギーをみんなにそしてクリーンに
9 産業と技術革新の基盤をつくろう

10 人や国の不平等をなくそう
