




































高精度屋内測位システム(屋内版GPS)の開発とその応用(情報工学科 田中博教授)
本テーマは、屋内で人やロボットなどの位置を高精度に検出するための技術です。屋内での人のナビゲーション、移動モニタやロボットの高精度な走行制御など、多くの適用領域が考えられます。

情報工学科 田中博教授
背景と目的
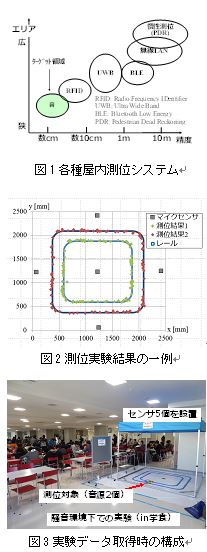
測位とは位置を特定することです。屋外ではすでにGPS(Global Positioning System)が一般的なものとなり、カーナビなど多くのサービスが普及しています。一方、屋内での測位技術には、様々な方法が提案されています(図1)。現在は無線LANの電波を用いた方法、慣性センサと呼ばれる加速度センサやジャイロセンサを用いた方法の事例が多くみられますが、それぞれに精度や検出エリアの問題などがあり、GPSにように一般的なものはありません。
我々のシステムの特徴と現在までの取り組み
我々は、音の伝搬速度の"遅さ"に着目して、高精度に屋内での測位を実現する手法を検討しています。電波に比べて圧倒的な"遅さ"によって、高い精度での受信のタイミング検出が不要になります。音として、超音波や人間が聞こえない非可聴音と呼ばれる音を用います。
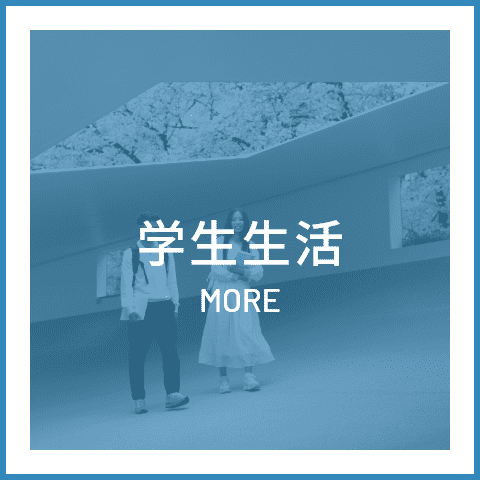
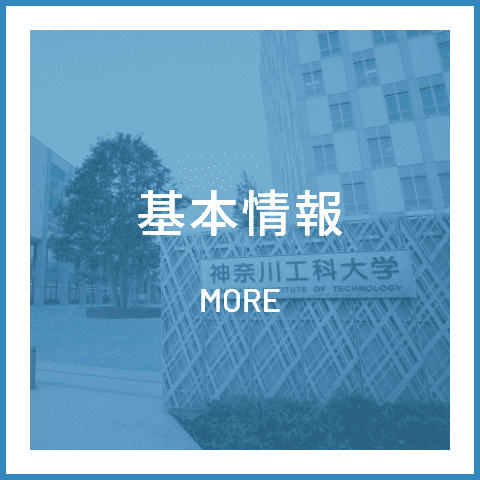
環境(天井や壁など)に埋め込んだ各マイクセンサが受信する音のタイミングの差から、コンピュータで計算して音源の位置を求めます。図2は本学の食堂で実験を行ったときの結果です。プラレールの模型列車にスマートフォンを取り付け、スマートフォンから音を出して、その位置を求めたときのものです。誤差は数cm以内に収まっています。あわせて、実験時の状況も示します(図3)。これらを学生が分担を決めて協力しながら進めています。
加えて、音波が電波と同じように波としての性質も持っていることを利用して、センサから得られる情報を音に埋め込んで伝送する機能も実現しました。このことにより、一つのシステムで位置の情報とセンサの情報を同時に得ることができます。
当面の目標とその先
より広域なエリアで測位を実現するための構成法の検討を行うとともに、我々のシステムの特徴が活かせる適用先を検討し、それを実証するデモシステムを構築する予定です。一案として、屋内での高精度なドローンの飛行制御が考えられます。
さらに、マイクセンサで受信する音から、環境の推定、人の行動の推定も可能になります。このように、"音"の利用と解析を通して、我々の生活を快適、便利にする技術とその実証を進めています。